eVTOL飞机对涡环状态的敏感性
eVTOL飞机对涡环状态的敏感性
在讨论eVTOL关于涡环状态的影响性之前,首先必须要认识到直升机的空气动力学和固定翼飞机相比非常复杂,在实际的旋翼类飞行器设计中,很多工作显示的复杂性会和已有理论相冲突,需要不断重新研究和设计修改。
即便是目前学术界对VRS、主旋翼/尾旋翼相互干扰、旋翼/旋翼相互干扰以及旋翼与地面的气动相互作用有更多深度的认知,但信息从学术界传递到工业界仍然需要通过商业工具长期来实现。这也是为什么在欧美很多高校会和小公司共同开发工具软件的原因。
说起VRS的现象理解,最直观的就是在直升机飞行手册中关于VRS的解释。直升机飞行员会经常使用动力解决问题,在某些表现形式中其实就是VRS,在某种速度和下降率下,你会发现直升机即使在升力总距下也在加速下降。使用动力解决问题就是通过耗尽性能裕度,因此无法维持水平飞行。
对VRS的经典理解是,当旋翼下降到自己的尾流中时,就会发生此类情况,就好像尾流出现并聚集在旋翼周围一样,这是VRS的最终状态。尾流本质上是不稳定的,但如果旋翼飞行器超过一定的飞行速度,这些不稳定尾流会被推到飞机后面,因此不会干扰旋翼。
当旋翼机减速并进入高速下降时,尾流的不稳定性会在某个时刻赶上旋翼,形成VRS。关于尾流不稳定性的理解程度及其带来的危险充分认知非常重要,任何简单的概念化都会低估风险,而对于追求起降效率的eVTOL更是如此。
无论是重型直升机还是轻小型直升机,或者eVTOL都会受到VRS的影响,因为桨盘载荷是主要因素,具有高桨盘载荷的轻小型直升机或者eVTOL会和具有相同桨盘载荷更大、更重的直升机产生相同尺寸和形状的VRS状态。

常规直升机和eVTOL设计的桨盘载荷与飞机重量之间的相关性
但是和配置有一两个大主旋翼的飞行器相比,具有几个较小的旋翼eVTOL产生升力时,对VRS的易感性会更复杂有所不同。通常人们会认为旋翼是独立工作的,但事实上,多个旋翼的尾流会相互干扰,进入VRS的一个旋翼可将这种效应串联到其他旋翼上。
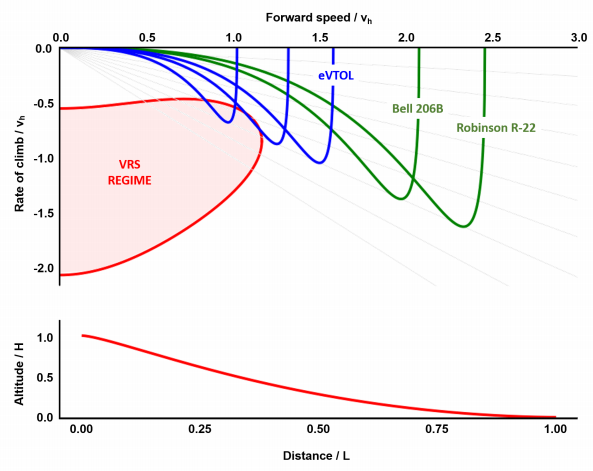
低下降速率下eVTOL和几个直升机型号的VRS分析
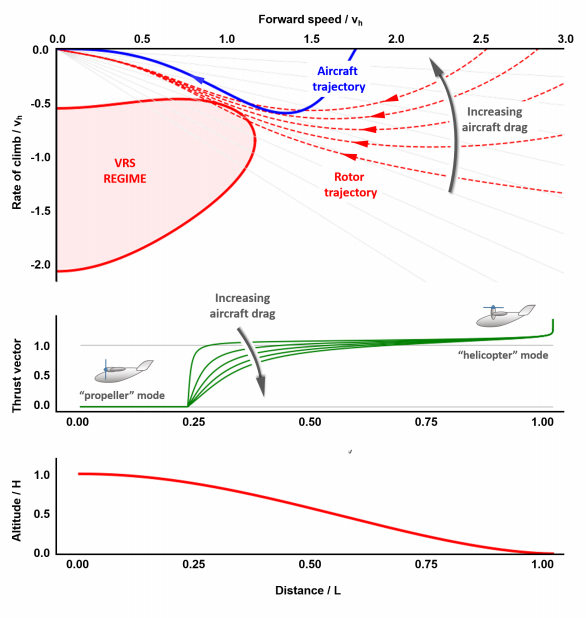
矢量推进eVTOL的VRS边界轨迹规划
对于VRS,具有大间距旋翼的效果是其中一个旋翼可以先于其他旋翼进入VRS,就像贝尔波音V-22可能发生的一样。如果旋翼机飞行具有滚转率,一个向上旋转的旋翼和另一个向下旋转的旋翼空气动力学状态会有所不同。类似V-22的旋翼飞机 ,可以让一个旋翼先于另一个进入VRS。同样的情况也可能发生在具有多个旋翼的eVTOL中。这是一个非常有趣的分析,使倾转旋翼的推力矢量化增加了进一步的复杂性。
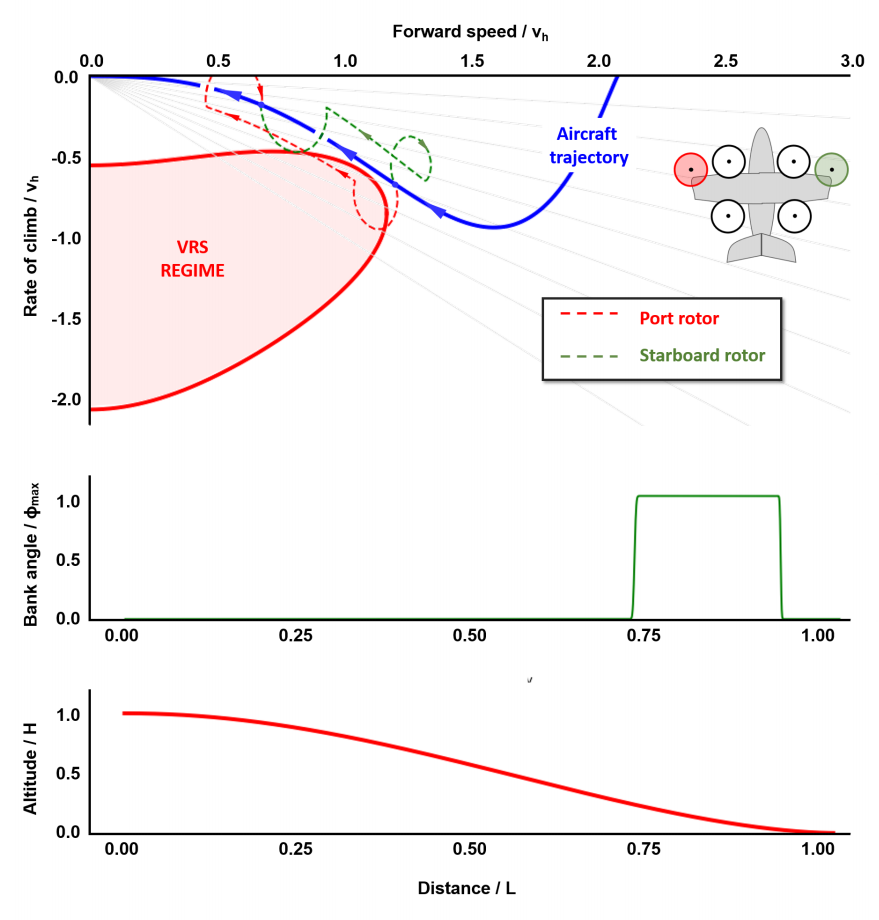
eVTOL飞机转弯时VRS边界行为
具体VRS对城市空中交通(UAM)的影响,会是一个潜在的问题。在设计垂直起降时,必须谨慎考虑VRS等空气动力学缺陷。如果要求旋翼飞机在最后30米(100英尺)的飞行中以45度角下降,就可能将eVTOL整机暴露在VRS下。例如,EASA实施的无障碍流量走廊可能会将eVTOL飞机限制在非常陡峭的进近过程中。
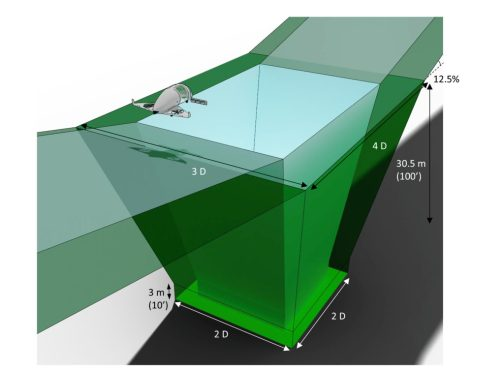
EASA规划的UAM空中进近走廊
目前eVTOL行业的一些整机制造商仍然在使用通用工具进行eVTOL分析,而在通用工具中运行eVTOL模型可能会误导设计者,获得一个比现实中明显优异的结果。其中有一些eVTOL飞机对VRS会表现出更多易感性,因此在工具选择上需要谨慎。不幸的是,一些eVTOL整机制造商由于在模拟或试飞中都没有遇到VRS,因此对VRS问题不屑一顾。