微纳扑翼飞行器前沿动态综述与启示建议 (上)
1 引 言
21世纪以来,随着计算机集成技术、材料科学、空气动力学、微纳制造与人工智能技术的不断进步,对机器人的研究正朝着微型化和智能化的方向发展[1-2]。以美国为首的西方国家在军方项目的支撑下已开展了二十多年的微纳机器人研究,并积极推动微纳机器人在未来无人战场的作战应用论证。1997年,美国国防部预先研究计划局(DARPA)发布了微型飞行器(Micro Air Vehicle,MAV)[3-4]项目,发展最大线性尺寸为15 cm或以下,运动半径为10 km,峰值速度超过13 m/s,运行时间超过20 min的微米级别机器人。2005年,DARPA宣布了“纳米飞行器”项目,该项目要求10 g以下的飞行器,最大尺寸为7.5 cm,能够飞行1 km以上。2018年,DARPA启动“短程独立微型机器人平台”(SHRIMP) [5]项目,研发微米-毫米尺寸、质量为数克、不系绳的微型机器人,用于隐蔽侦察、灾后搜救、基础设施检查、火星表面探索等任务,以此来推动颠覆性技术的发展,为美军抢占未来无人作战“制高点”提供技术储备。
传统界定上,微纳机器人指的是尺度在微纳米级别(几纳米至几百微米)的微型机器人,本文对微纳机器人的界定主要根据机器人的特征尺寸:特征尺寸在纳米量级,整体尺寸在纳米/微米量级的机器人界定为纳机器人;特征尺寸在微米量级,整体尺寸在微米/厘米量级的机器人界定为微机器人,因此微机器人包含了传统界定上的微米尺度的机器人和厘米尺度的微型机器人。
微飞行器是微纳机器人中具有广阔应用前景的一类,目前广泛研究的有固定翼[6]、旋翼[7]、扑翼[8]三种运动形式的飞行器,在宏观的军民通用航空领域,固定翼飞行器和旋翼飞行器性能优越,应用广泛,但随着飞行器整体尺寸的缩小,在低雷诺数的条件下将难以产生足够升力并保持稳定,而扑翼飞行方式[9-10]在微小尺度下可以产生足够的升力,拥有更多的优势,因此微型扑翼飞行器成为微飞行器领域研究的热点。
当前,以哈佛大学、华盛顿大学、上海交通大学、国防科技大学等为代表的国内外高校已研制出多种微纳机器人样机[11-14],受尺度、能量与载荷等条件制约,研究水平总体处于实验室阶段,其中,微飞行器由于运动灵活、易渗透、越障能力强等优点,成为众多机构研究的热点。本文主要对微纳扑翼飞行器的结构设计、加工工艺以及能源驱动的发展态势进行综述。首先介绍了微纳扑翼飞行器的概念和气动力学分析;其次讨论了微纳扑翼飞行器不同的传动结构、加工工艺以及能源驱动方式的机理特点;再次对微纳扑翼飞行器的应用潜力和发展态势挑战进行了概括;最后对微纳扑翼飞行器在未来需重点研究的方向给出建议。
2 微纳扑翼飞行器的气动力学分析
2.1 双翅目昆虫飞行机理的研究
昆虫一般具有体形微小、运动灵活、感知能力灵敏的特点,还能实时监测周围环境,进行精准定位,并在复杂的气流环境中始终保持稳定运动。双翅目昆虫是扑翼飞行类昆虫的典型,如图1所示,双翅目昆虫蚜蝇在飞行时的运动主要由两部分组成:扭转运动和拍打运动,升力是在两种运动的共同作用下产生的。

图1 蚜蝇翅膀的运动学结构
Fig.1 Kinematic structures of aphid fly wings
拍打运动时翅膀绕着拍打轴线旋转,拍打轴线与扭转轴线垂直并且通过翅根,采用“上冲程”和“下冲程”来描述翅膀的上下拍打运动[15],在飞行的过程中,蚜蝇通过胸腔的快速收缩使翅膀产生拍打运动。扭转运动时翅膀绕着扭转轴线摆动,扭转轴线沿翼展方向和翅前缘相关联;扭转运动主要由向外扭转和向内扭转组成,蚜蝇翅膀的扭转运动完全可以依靠气动力和惯性力的作用共同产生,而无需额外的肌肉去提供能量,在扭转运动中,飞行肌肉主要起到控制扭转角度的作用[16]。
微型扑翼飞行昆虫的飞行运动是一种低雷诺数下的飞行状态,采用稳态空气动力学的原理无法解释,需用非定常空气动力学原理来解释扑翼飞行时产生高升力的机制,当前主要有打开-合拢机制(Clap-Fling)[17]、延时失速机制(Delayed Stall)[18]以及尾迹俘获机制(Wake Capture)[19]三种机制。
(1)打开-合拢机制
1973年,Sane S P[17]在研究大黄蜂翅膀运动规律的基础上提出了“打开-合拢”机制。该机制指出在扑翼飞行时,昆虫的翅膀拍打至上冲程极限处并保持两翅膀平面互相平行,然后从上冲程至下冲程过程中绕翅膀的后缘迅速地打开,打开到一定的角度后,两个翅面彻底分开作平动,因为翅膀打开迅速,导致翅膀周围的气流无法绕过翅膀前缘来到翼面上方,在翼面上会形成一个提供升力的负压区,如图2所示,且形成时的升力大小主要取决于翅膀打开的角速度和角加速度。

图2 Clap-Fling过程示意图
Fig.2 Diagram of the Clap-Fling process
(2)延时失速机制和前缘涡
1996 年,Ellington 等[18]通过烟雾来可视化真实气场流动,对鹰蛾扑翼动作进行观察,发现在快速平动的过程中翅膀上方会形成一个低气压区,且随着翅膀扭转角的增加,流过翅膀的气流漩涡在穿过前缘时分离,但在到达后缘前重新附着。由于流体重新附着,流体继续从后缘平稳流动,这种状态循环维持。在这种情况下,因为翅膀在较大的偏转角下变换,赋予流体更大的向下动量,从而大大提高升力。图3为二维线性平移与三维扑动平移的比较,翅膀在平动过程中,涡旋沿着前缘和后缘交替脱落。当翅膀扑动时,前缘涡的大小趋于稳定,后缘没有产生额外的涡量,翅膀传递给流体的净向下动量会产生下洗流,导致稳定旋转翅膀上净空气动力的恒定值略微降低。研究表明,前缘涡是昆虫翅膀产生的气流及其产生的力的重要特征。

图3 二维线性平移与三维扑动平移的比较
Fig.3 Comparison of linear translation in 2D and flapping translation in 3D
(3)尾迹俘获机制和翻转效应
Dickinson等[19]研究还发现在翅膀拍动的过程中,会交替产生一组升力峰值,如图4所示。两个峰值产生的原因有差异,第一个峰值是拍动翅膀时扰动的空气在尾部形成气流被俘获引起的,称为“尾迹俘获”,第二个升力峰值是由于翅膀快速扭转拍打而产生的,称为“翻转效应”。

图4 翅膀拍动过程交替产生的升力峰值
Fig.4 The lift peak produced by the wing beat process alternately
2.2 扑翼飞行的空气动力学
翅膀是决定扑翼飞行性能的关键因素,翅膀的形貌结构、质量分布以及面积大小等对飞行性能起着至关重要的作用。为方便定量分析翅膀对飞行性能的影响规律,需建立翅膀结构的参数化模型,真实的昆虫翅膀是复杂的三维结构,但其总厚度通常只有数十微米[20],因此通常忽略其垂直翅膀平面的厚度,只考虑其翅面的几何形状和质量分布,如图5所示。
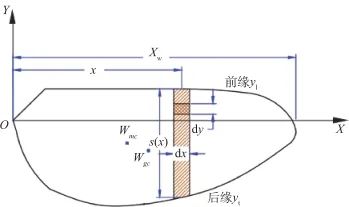
图5 双翅目昆虫翅膀平面轮廓和几何参数
Fig.5 Plane profile and geometric parameters of the wings of diptera insects
