垂直起降无人机动力装置研究现状
垂直起降无人机兼具固定翼无人机飞行速度快、距离长和旋翼无人机垂直起降的优点,有着对跑道无依赖、能够定点悬停、前飞速度快、航程远等特点,在现代战争和民用领域有着极为广泛的用途。而实现垂直起降与高速飞行两大功能的核心在于动力装置,其直接决定无人机构型、升限、航程、载重等重要技术指标,是制约垂直起降无人机发展的关键和难点。本文针对垂直起降无人机典型动力装置研究和应用现状开展了研究,并根据其特点对动力装置基本构型进行分类,在此基础上对各类动力装置的特点进行分析。

引言
二十世纪 50 年代的无人机结构、控制简单,主要是作为靶机使用;60 年代后,无人机的研究重点开展着力于侦查用途,标志着其无人机技术开始进入以应用需求为牵引的快速发展阶段;近几十年来,世界各军事强国不断推出用于情报获取、战术侦查、目标打击、货物运输等无人机研究计划,且成果斐然。从两伊战争、海湾战争、科索沃战争到阿富汗战争、伊拉克战争,无人机以其特有的优势在战场上的使用越来越广泛,发挥了越来越关键的作用。
垂直起降无人机是一种专门的定义,特指兼具固定翼无人机和旋翼无人机优势,既能像固定翼无人机一样水平高速飞行,又能像无人直升机一样垂直起飞、悬停、降落的一类无人机。垂直起降无人机摆脱了滑跑和降落所需的场地要求,或者专门的发射和回收装置,使装备环境适应性大幅提高。因此,垂直起降无人机一直以来都是无人机领域研究的重点方向,而制约垂直起降无人机技术发展和应用的关键所在是动力装置。本文从对垂直起降无人机动力装置基本构型出发,按升力和推力来源的不同将动力装置进行分类分析和梳理,对典型技术方案进行研究,得出不同类型动力装置的使用和应用方向。
垂直起降动力装置主要构型及研究和应用现状
垂直起降无人机融合了旋翼无人机和固定翼无人机的优势,可以实现垂直起降、悬停、高速飞行,但其缺点也很明显,那就是难以解决两种模式融合带来的“死重”问题。
“死重”主要包括三种:
1)垂直起降或飞行过程中无用的装置带来的直接“死重”;
2)垂直起降模式下动力功率需求大,飞行模式下动力功率小,采用同一动力装置时会出现飞行状态下“大马拉小车”的现象,同样带来“死重”;
3)结构设计复杂带来的“死重”,尤其是面积较大的机翼,在垂直起降过程中会带来较大的阻力,产生额外的增重效应,而如果采用独立的升力系统,在平飞过程中也会带来很大的飞行阻力。
因此,垂直起降无人机需要解决的根本问题是为了降低“死重”影响而提出的各种无人机构型及其动力技术。按照动力装置的不同(主要指升力和推力产生的原理),本文将垂直起降无人机的主要构型分为四大类:倾转涵道风扇、倾转旋翼、复合式以及停转旋翼。
一、倾转涵道风扇动力装置
(1)不带机翼的倾转涵道风扇动力装置
不带机翼的倾转涵道风扇动力装置可以说是从直升机旋翼加涵道改进而来,其水平飞行动力来源于无人机整体小角度倾斜后,涵道风扇桨叶产生斜向推力,分解到竖直方向的分力形成升力抵消重量,分解到水平方向的分力形成推力,推动无人机飞行。
“AROD”无人机(图 1)来源于 20 世纪 80 年代末期美国海军陆战队发起的美军地空遥控机器人系统。该无人机以涵道作为主体,没有机翼,仅通过一个 19.12kw 的活塞发动机驱动涵道内部三个定桨距桨叶高速旋转提供升力,通过改变出口气流的方向实现飞行器的姿态调整和稳定飞行。“AROD”无人机曾在一次飞行试验中展示了 30 多分钟的无约束飞行,其表现出的飞行和控制性能,证明了此类气动布局和动力配置的涵道无人机是可以实现垂直起降、可控飞行的。在后续联合宇航公司发展的“ISTAR”无人机、霍尼韦尔公司 Kestrel 无人机乃至“MAV”项目中都能看到“AROD”的影子。
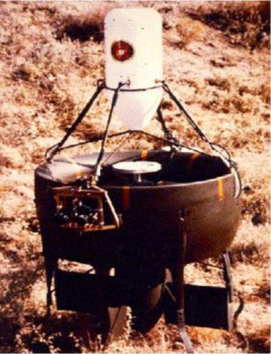
图 1 “AROD”无人机
2003 年,DARPA 主持启动了“MAV”演示验证项目,其目标是设计一种单兵背负的涵道式无人机,主要用于地面作战小分队。霍尼韦尔公司的“MAV”无人机采用涵道风扇动力装置。涵道风扇由一台活塞发动机驱动,为“MAV”无人机提供垂直起降和前飞动力。与固定翼无人机不同,“MAV”无人机可以 74km/h 的速度飞行,续航时间约为 46 分,可提供精确的点部署和恢复且易于操作,能够实现更好的悬停和凝视能力。在伊拉克战争中,美军使用装备的“MAV”无人机的开展近距离监察和排爆工作,使用非常成功。

图 2 “MAV”无人机
(2)带机翼倾转涵道风扇动力装置
配备带机翼倾转涵道风扇动力装置的无人机飞行动力来源与固定翼飞机原理相同,通过机翼上下表面压差形成升力。
DARPA 于 2013 年启动了“VTOL X-Plane”项目,意在开发能够垂直起降、悬停和高速飞行的无人机。波音公司的“鬼怪雨燕”无人机(图 3)全尺寸翼展 15.2m,机身长度 13.4m,重量 5450kg,安装 2 台涡轴发动机发电,机身内嵌入 2 个大型升力风扇用于提供大部分的升力,两侧翼尖安装 2 个小型可倾转涵道风扇用于提供小部分升力和前飞推力。飞机起飞后,机身内的 2 个升力风扇通过“百叶窗”来调节悬停或向前机动,翼尖涵道风扇开始倾转之后,机身涵道风扇停止工作,无人机像常规固定翼飞行器一样平飞。

图 3 “鬼怪雨燕”倾转涵道无人机
同样是在“VTOL X-Plane”项目的支持下,极光飞行科学公司的“雷击”无人机(图4)采用了整体倾转机翼和发动机组。当机翼整体处于水平位置时可以实现平飞巡航,当机翼整体倾转 90°时可以实现垂直起降和空中悬停。“雷击”无人机翼展 18.6m,重量5400kg,最大连续飞行速度 740km/h,用 2 台安装在机身上方中尾部的涡轮轴发动机为主动力,驱动 3 台发电机,然后再供给 24 台电动机。该无人机在垂直起降和悬停状态时,全部燃气-电力装置处于满功率运转工况,而巡航时只需提供 65%~75%的最大功率,并以电力推进装置为主,经济性较好。

图 4 巡航飞行中的“雷击”无人机
2020 年,美国空军启动了名为“敏捷至上”的演示验证项目,旨在探索航空业新兴的电动垂直起降(eVTOL)技术在特种作战、救援搜索、短距运输等军事任务应用的可行性,推动商用技术向军事领域转化。Sabrewing 飞机公司在“敏捷至上”线上活动中展示了雷戈-A(图 5)货运电动垂直起降无人机概念,获得“敏捷至上”项目首批合同。在起飞和降落过程中,4 个涵道风扇平行于地面,可提供升力;在飞行过程中,4 个涵道风扇倾转,向后推进,利用机翼提供巡航升力。此外,在具备跑道的条件下,雷戈-A 无人机还具备固定翼飞机的常规起降模式,此时可大幅提升载重能力 80%以上。
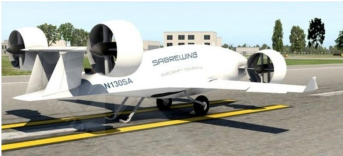
图 5 “雷戈”-A 货运电动垂直起降无人飞行器
V-Bat”无人机[6]是 Morris 博士在 DARPA 未来作战系统现代化计划任务中开展的涵道风扇垂直起降无人机,如图 6 所示,其采用垂直尾坐方式实现垂直起降,起飞后整体倾转实现平飞。其翼展 2.75m,重量 37.2kg,巡航速度 83km/h,最大速度 167 km/h,航程 560km。
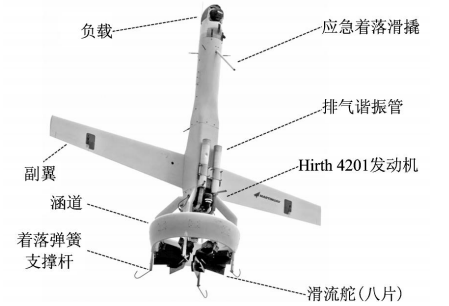
图 6 “V-Bat”无人机
二、倾转旋翼动力装置
倾转旋翼无人机以旋翼为升力和推力的主要来源,通过局部倾转机翼或整体倾转机身,实现旋翼的变向,从而实现垂直起降和高速飞行。
在“VTOL X-Plane”项目中,卡雷姆公司采用倾转旋翼概念方案,使用 2 台功率1870kw 的涡轴发动机驱动,外机翼上安装有 2 个大螺旋桨,可以倾转 90°,用于垂直起降和快速爬升。西科斯基公司则采用了机身整体倾转(即尾座式)垂直起降无人机方案,使用了 2 个螺旋桨,对称安装在两侧机翼的中部,每个螺旋桨装有 2 个大尺寸桨叶,每副螺旋桨由一台涡轴发动机驱动。
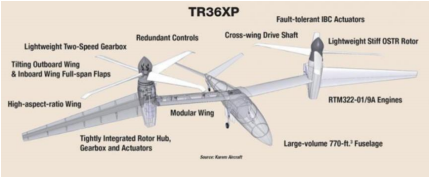
图 7 卡雷姆公司倾转旋翼机概念方案

图 8 西科斯基公司的尾座式垂直起降无人机
三、复合式动力装置
复合式构型无人机直接采用两套动力装置,一套负责垂直起降,另一套负责飞行。
“龙勇士”(Dragon Warrior)无人机[8]由美国海军研究实验室 2001 年起研制,用于侦察监视和精确瞄准平台及海军陆战队空地特遣部队内部通信中继系统。在垂直飞行时,升力由涵道风扇提供;水平飞行时,在机身上布置有常规的机翼,无人机尾部有一个较小的涵道风扇,用于提供向前平飞的动力。

图 9 “龙勇士”无人机
L3 哈里斯公司于 2020 年研制的 FVR-90 无人机[9]采用多体、复合多旋翼新型布局,四个旋翼对置分布于两侧机体,用以提供垂直起降的升力,尾部的螺旋桨提供飞行器水平前飞所需的推力,是一种典型的复合式垂直起降无人机。FVR-90 无人机飞行速度65km/h,续航时间 12~18h。

图 10 FVR-90 无人机
在“敏捷至上”项目中,美国初创企业艾罗伊公司研发了“礼拜堂”(Chaparral)无人机。该无人机采用混合电推进系统,采用固定翼与旋翼的混合构型,在两侧机翼中部的前后方各设置一个定距螺旋桨,提供垂直起降所需升力,机身尾部设置一个推进螺旋桨,提供平飞巡航阶段的推力,其有效载荷为 100~225kg,航程 500km。

图 11 “礼拜堂”无人机
四、停转旋翼动力装置
停转旋翼指垂直起降过程中,旋翼高速旋转提供升力,在高空达到前飞速度后,逐步停转并固定下来作为机翼使用,使无人机以固定翼模式飞行。
“蜻蜓”X-50A[10]是波音公司研制的一种典型的停转旋翼无人机,动力装置采用涡扇发动机,垂直起降过程中将涡扇发动机尾流引至旋翼,从翼尖切向喷出驱动旋翼旋转;飞行过程中涡扇发动机尾流直接喷出,产生推力。
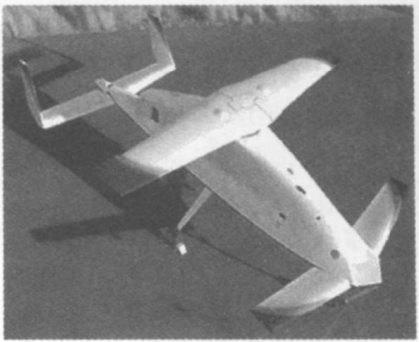
图 12 “蜻蜓”X-50A
垂直起降动力装置发展和应用分析
(1)倾转涵道风扇动力装置
不带机翼倾转涵道风扇动力系统工作原理与无人直升机类似,虽然增加涵道增大了重量,但是由于采用了涵道,桨叶半径和整机尺寸较小,结构更加紧凑,且防撞性能好、噪声低、一定程度上能够提高升力效率。然而这样的构型也决定了无人机的飞行速度、飞行距离、续航时间都与无人直升机相近,且无法携带大量载荷,因此其使用范围有限,仅适合执行近距离 ISR 任务。
带机翼倾转涵道风扇动力装置飞行速度、飞行距离、续航时间等都更长,但由于附带机翼,重量更大、垂直起飞阻力更大。为了减小阻力,可将全部或部分机翼倾转,如“V-Bat”这种尾座式飞行器,涵道、机翼、机身为一体,通过尾座式姿态实现起降,起飞后飞行器整体倾转,实现平飞,这类飞行器推力随机体同步换向,无需复杂的倾转机械机构,相对结构简单、重量轻,但是由于涵道风扇要同时兼顾起降/悬停和水平飞行两种模式,两种飞行模式的动力需求差距极大,如何保证起降/悬停和平飞模式下均有较高的推进效率是动力装置设计的难点。同时,由于机身整体倾转、重心偏下,大大提高了倾转难度,使其无法携带大量的载荷,更适合载重较小的 ISR 任务;而且,垂直起降或静止状态下机翼垂直摆放,迎风面积大,在军舰等风速较大的场景下起降操控难度极大。
“鬼怪雨燕”、“雷击”、“雷戈”等将涵道风扇置于翼尖或机身,单独倾转涵道风扇实现垂直起降,这类飞行器动力和机身相对独立,但机翼会带来较大的垂直起飞阻力,需要复杂的倾转机构,结构复杂,同样由于涵道风扇要同时兼顾起降/悬停和水平飞行两种模式,两种飞行模式的动力需求差异极大。为了降低动力装置难度,“鬼怪雨燕”平飞时仅倾转部分风扇,其余风扇停用;“雷击”机翼整体倾转,机翼带来的垂直起飞阻力较小,但倾转操作难度更大,动力系统多工况匹配性等问题同样存在;“雷戈”则给出兼具两种场景飞行能力的解决方案,即在具备跑道的场景下能够携带大量载荷,不具备跑道的场景下携带少量载荷。这类无人机的特性更接近固定翼飞行器,一定程度上降低了“死重”,飞行速度快、航程远,更适合载重较大的物资运送、空中侦察等应用场景。
(2)倾转旋翼动力装置
倾转旋翼动力装置技术特点与带机翼倾转涵道风扇动力装置相似。卡雷姆公司X-plane 方案为与 V-22“鱼鹰”类似的构型,将旋翼置于翼尖,单独倾转旋翼实现垂直起降,这类飞行器与倾转涵道风扇无人机类似,需要复杂的倾转机构,结构复杂,两种飞行模式的动力需求差异极大。此外,在起飞和悬停状态下,旋翼和机翼之间存在明显的气流干扰情况,机翼上表面受到的旋翼下洗流增重效应严重影响了飞机的运输能力。
西科斯基公司 X-plane 方案为尾座式整体倾转旋翼机,由于旋翼作用面积大,使得无人机无论是起飞、姿态调整、悬停还是平飞状态,机翼都几乎完全笼罩在下洗流中,使机翼不会发生气流分离。但是,同样面临着机翼垂直状态下迎风面积大,在军舰等风速较大的场景下起降操控难度大的问题。
与带机翼倾转涵道风扇动力装置类似,单独倾转旋翼动力装置更适用于执行物资运送、空中侦察任务;尾座式倾转旋翼动力装置更适用于执行 ISR 等任务。
(3)复合式动力装置
复合式动力装置构型简单、无需倾转机构、无需整体姿态调整,工程实现难度较小。但是存在大量缺点:1)垂直起降动力装置和飞行动力装置均是独立使用,即垂直起降过程中推进系统不工作,飞行过程中升力系统不工作,给两种工作模态都带来很大的直接“死重”,结构重量太大,飞行速度不会太快,载重量很小;2)垂直起降阶段,大面积的机翼会增大起降阻力,在平飞阶段,旋翼则会增大飞行阻力,带来了较大的间接“死重”;3)固定翼和旋翼结构在气体动力学上会互相干扰,影响效率,同样带来间接“死重”。
尽管复合式动力装置的“死重”问题最严重、效率低下、载重量小、航程小,但是其在工程上是最容易实现的,因此目前国内外均有大量企业开展研发和应用,一般可用于军事侦查或短距离轻载运输等场景。
(4)停转旋翼动力装置
停转旋翼无人机既没有两套动力装置带来的直接“死重”,也没有大面积的机翼或两套动力装置互相干扰带来的间接“死重”,所以“死重”问题可能较小。但是,停转旋翼的研制难度是最大的:1)旋翼设计需兼顾固定翼机翼的功能,而旋翼和机翼虽然工作原理均为机翼上下受力差形成升力,但具体设计方法不尽相同,导致旋翼不仅设计难度增大,而且在两种模式下都无法达到最优效果;2)通过旋翼翼尖喷气驱动旋翼旋转效率较低、且难以控制,带来一系列结构问题;3)垂直起降和平飞之间姿态转换过程中,旋翼的非定常载荷非常严重,操控难度极大;4)由于结构实现难度大,为了克服结构难度导致机械系统复杂度大大提高。
相对而言,停转旋翼无人机大幅解决了“死重”问题,但是其存在大量的技术问题需要解决,研制难度极大,因此,目前国内外对该构型的工程研制很少见。该构型无人机动力装置可能更适用于尺寸小、载重量轻、执行 ISR 任务的无人机。
启示和建议
本文结合无人机构型将垂直起降动力装置进行了分类,对各类型动力装置的技术优劣、应用场景进行归纳总结,得出以下启示和建议:
(1)垂直起降无人机可执行长距/短距 ISR、物资运送、高/低空侦察等任务,在军用和民用领域都有着极为广阔的应用场景,发展前景广阔,可针对不同的应用场景开展相关研究工作;
(2)制约垂直起降无人机及其动力装置发展的关键技术包括飞发气动耦合设计技术、飞行模态转换控制技术、倾转机构等机械结构设计技术等,需要开展深入的技术研究;
(3)复合式动力虽然效率低、载重量小、航程短,但是技术实现难度相对较小,仍然是当前阶段研究的重要方向;倾转涵道风扇和倾转旋翼技术难度较大,但应用前景广阔,且已有工程应用,应开展较为深入的关键技术研究;停转旋翼技术难度最大,建议更多的开展理论研究和单点关键技术攻关。