中国无人机飞控算法的发展
中国无人机飞控算法的发展
一、无人机飞控算法的基础
无人机飞控算法的基础是飞行动力学和控制理论。飞行动力学研究飞机在空气中的运动规律,包括姿态控制、稳定性和操纵性等方面。
控制理论研究如何设计控制器来实现期望的飞行动作和轨迹。这些基础理论为无人机飞控算法的设计和优化提供了理论基础。
二、无人机飞控算法的发展历程
01
初期阶段:
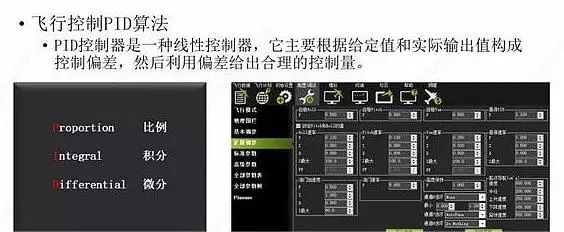
在无人机技术刚刚起步的初期,飞控算法主要采用传统的控制方法,如PID控制器。PID控制器通过调节比例、积分和微分参数来实现对飞机的控制。这种方法简单易懂,但对于复杂的飞行任务和环境变化较大的情况下效果有限。
02
进阶阶段:
随着无人机技术的发展,飞控算法逐渐引入了更加先进的控制方法和算法。
例如,模型预测控制(Model Predictive Control,MPC)可以通过建立飞行动力学模型和优化算法来实现对飞机的控制。这种方法可以考虑到飞机的动力学特性和约束条件,提高了飞行控制的精度和稳定性。
03
深度学习应用:
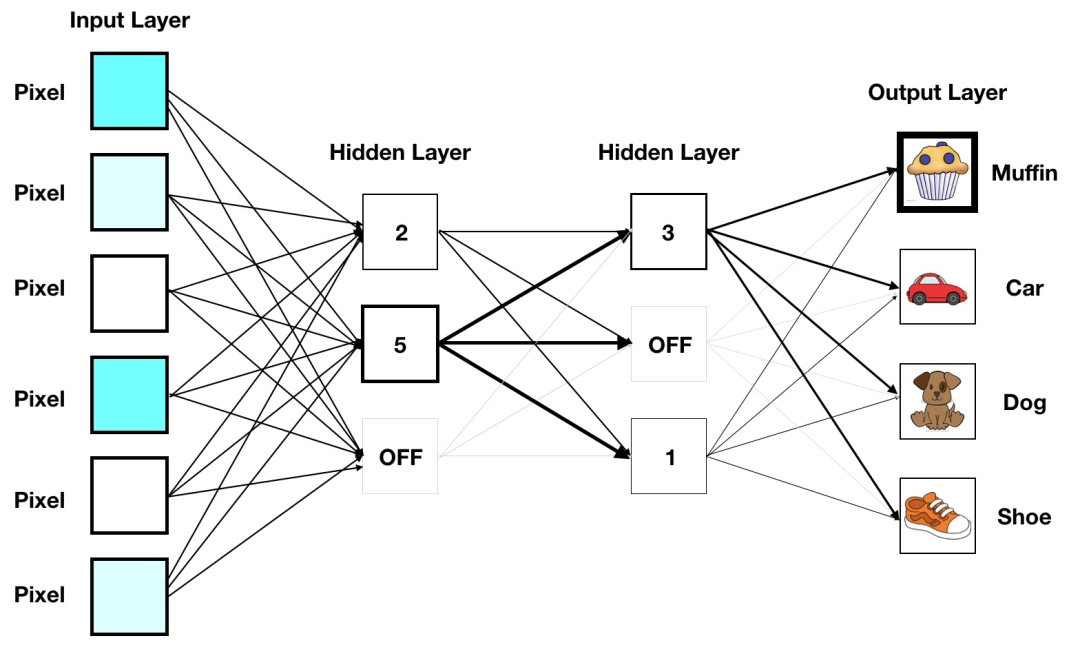
近年来,深度学习技术在无人机飞控算法中得到了广泛应用。深度学习可以通过训练神经网络来学习复杂的飞行控制策略和模式。
例如,卷积神经网络(Convolutional Neural Network,CNN)可以用于图像识别和目标跟踪。
循环神经网络(Recurrent Neural Network,RNN)可以用于序列数据的处理和预测。
这些深度学习算法可以提高无人机的自主飞行和感知能力。
三、中国无人机飞控算法的应用
01
自主飞行:
中国的无人机飞控算法可以实现无人机的自主飞行能力。
通过结合传感器数据和飞行控制算法,无人机可以实现自主起飞、航线飞行、自主降落等功能。
这为无人机的应用提供了更大的灵活性和安全性。
02
目标跟踪:
无人机飞控算法可以实现对目标的自动跟踪和识别。
通过图像处理和深度学习算法,无人机可以实时识别和跟踪目标,如车辆、人物等。这在军事侦察、安防监控和救援等领域具有重要应用价值。
03
群体协同:
中国的无人机飞控算法还可以实现多架无人机的群体协同飞行。
通过无线通信和分布式控制算法,多架无人机可以实现协同任务,如搜索救援、巡航监测等。这为无人机的应用提供了更大的扩展性和效率。

四、未来展望
01
强化学习:
强化学习是一种通过试错和奖惩机制来优化控制策略的方法。将强化学习应用于无人机飞控算法可以进一步提高无人机的自主飞行和决策能力。
02
安全性和和鲁棒性:
无人机的安全性和鲁棒性是无人机技术发展的重要方向。
无人机飞控算法需要考虑到各种异常情况和故障,提高无人机的安全性和可靠性。例如,无人机飞控算法可以设计故障检测和容错机制,以及自适应控制算法,使无人机能够应对各种不确定性和干扰。
03
智能决策和规划:
随着无人机应用场景的不断扩展,无人机飞控算法需要具备智能决策和规划能力。
例如,在复杂的环境中,无人机需要能够根据任务需求和环境条件做出智能的飞行决策和路径规划,以实现高效、安全的飞行。
未来,随着技术的不断创新和发展,无人机飞控算法将进一步提高无人机的自主性、感知性和安全性,推动无人机技术在各个领域的应用和发展。