eVTOL,NID控制器
eVTOL,NID控制器,
美国推动的小企业和高校合作研究支持带来的创新成果,一直在保持着高速且稳定的输出;为了响应科技自立,中国高校和央企直接以大型项目为合作基础的主流模式急需改革。
— 1 —
背景
最近,用于城市空中交通应用的电动垂直起降(e-VTOL)飞机概念出现了爆炸增长。这种新型飞机需要开发传统直升机的各种子系统。一个特殊的子系统是飞行控制器。虽然行业已经开发了多种配置,但设计之间的一个共同主题是具有冗余控制,即可能影响飞机状态特定变化的多个控制执行器。对于飞行控制器设计,这提供了通过非传统方法进行控制的机会,并且如果特定控制效应器发生故障,也可以提供控制冗余。
一般来说,旋翼机必须处理影响飞行器性能相互作用的空气力学问题。对于多旋翼eVTOL,这是一个更大的问题,因为许多概念都使用分布式电推进,其中有多个旋翼尾流相互作用,并与飞机的其他部分相互作用。许多设计都采用了复合旋翼构型,其中空气动力学升力面会受到旋翼的影响,反之亦然。过去已经对各种构型和最近对多旋翼eVTOL飞机进行相互作用效应的建模。同样,需要为多旋翼eVTOL飞机建模和设计新型飞行控制器,同时考虑这些相互作用的影响。非线性动态逆(NDI)控制器是非常适合这类应用的控制器。自20世纪80年代末以来,航空界对NDI控制器进行了研究,最近在F-35战斗机上、倾转旋翼无人机和更大的旋翼无人机进行了改进,如UH-60的概念复合机型。最近的工作更多是为多旋翼复合构型飞机,特别是eVTOL飞机使用NDI控制器。经过Lombaerts等人不断的努力研究,已经证明其开发的控制系统可以实现闭环性能,实现ADS-33E-PRF标准定义的1级操纵品质。INDI非常适合作为eVTOL飞行控制器,因为其不太依赖于模型的精确空气动力学建模。因此,INDI可以在有限的空气动力学信息下运行良好。在eVTOL的使用中,对于在控制分配期间是否使用可变总桨距控制或可变旋翼速度控制来控制旋翼的推力存在着争论。针对可变总距控制研究,为了满足1级操纵品质,动力时间常数必须小于0.2秒。因此,使用可变旋翼速度控制是不切实际的。Malpica等人比较了eVTOL飞机的操纵品质,该飞机使用可变总桨距控制或可变旋翼速度控制,发现无法用可变旋翼速度方法稳定飞机的横滚和俯仰动力学。
为了继续解决NDI控制满足eVOTL需求的问题,新的研究工作继续被开展,首先,研究使用空速计划切换系统,将飞机的控制结构从低速直升机控制系统切换到高速飞机控制系统。其次,研究一种新的推力控制分配方案的使用,该方案将可变总桨距和可变旋翼速度控制结合到统一的控制分配方案中。
— 2 —
仿真
为实现上述研究的目的,所有模拟工作都是使用DEPSim模拟器生成。DEPSim是宾州州立大学和CDI之间的合作项目。CDI合作目标是将CDI的CHARM空气力学代码与宾州州立大学的PSUDEPSim飞行模拟代码相结合。除了执行所有模拟,DEPSim还用于生成飞行控制器设计的线性模型,使用了PSUDEPSim导出的线性模型和从CHARM耦合模拟中提取的线性模型。PSUDEPSim利用一个基本的旋翼模型来模拟旋翼空气力学。因此,PSUDEPSim生成的线性模型实际上是低保真度的。CHARM是旋翼系统和提升表面的一个更逼真的空气力学模型。具有旋翼尾流建模功能,可以捕捉旋翼尾流和其他气动部件之间的相互作用效果。因此,从CHARM耦合模拟得出的模型在本质上应该是更高的保真度。
研究工作使用了一个内部复合翼飞机概念。飞机使用4个悬停旋翼和1个推进器。每个旋翼都有能力改变叶片的总桨距并改变其转速。一个机翼、一个水平尾翼和两个垂直尾翼也融入设计中。这些特征使得飞机也可以像固定翼一样高速运行。还增加了额外的控制表面,以在向前飞行期间提供额外的控制效应,包括每个机翼上的副翼、每个垂直尾翼上的方向舵和水平尾翼上的升降舵。螺旋桨由三相交流永磁同步电动机(PMSM)驱动。电机的动态模型包括q轴和d轴电流的状态,以及电机轴的角速度和位移。电流控制器调节电机电流,另外两个状态以控制器积分的形式添加到系统中。电机动力学中也考虑了最大可交付扭矩,受控PMSM的动力学。
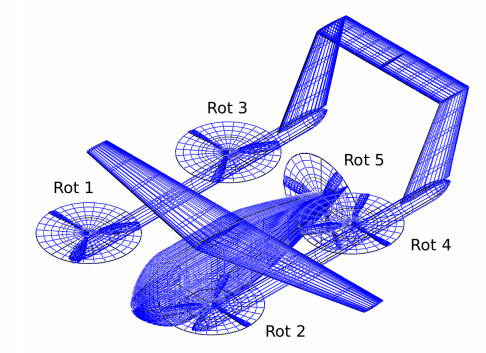
通用eVTOL飞机的OpenVSP模型
Q轴电流控制方法用于电机控制,该方法使用对电机电压的PI反馈控制,以将d轴电流ia调节为零,并跟踪q轴电流i中的指令。然后,电机的扭矩输出与q轴电流成比例。然后,q轴电流指令由调节电机转速的控制器计算。电机RPM控制器使用动态反转方法,对RPM跟踪误差进行PI补偿。电机RPM动态可通过以下方程近似,其中电机扭矩与q轴电流成比例:
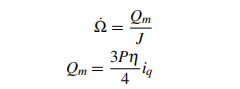
其中J是螺旋桨惯性,P是电机极数,r是电机磁链。然后,控制器被设计为使得旋翼速度跟随滤波后的指令信号:
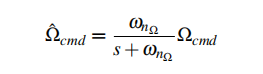
根据动态逆方法得出的控制器为:

强制执行电机扭矩限制,并将其解释为电流限制,然后将其应用于命令的q轴电流。对于带q轴控制的PMSM电机,最大扭矩可通过以下方式与最大电流相关:
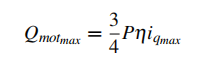
因此,236.02 ft-lbf的扭矩限制被解释为85.33 a的最大电流。
— 3 —
飞行控制系统
 控制架构策略
控制架构策略
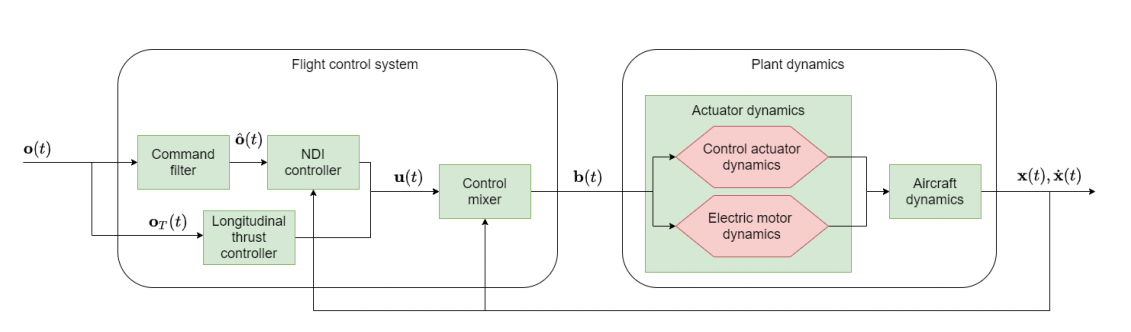
总体控制架构如上图所示,飞行控制器由四个主要部件组成:指令滤波器、非线性动态反演(NDI)控制器、纵向推力控制器和控制混合器。指令滤波器用于根据发出的指令生成理想的飞机响应δ(t)。NDI控制器解释指令滤波器的理想响应并产生控制信号u(t)以产生该理想响应。纵向推力控制器解释推力指令或(t),并生成控制向量u(t)的推力控制。最后,控制混合器用于在所有可用的控制效应器之间分配控制信号,这些效应器将形成物理控制动作b(t)。
输入指令
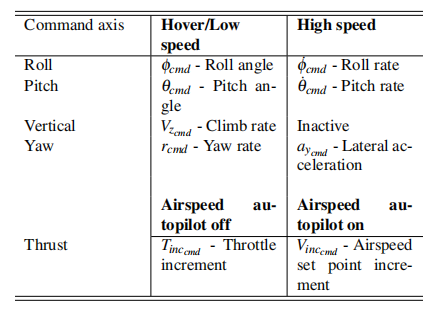
指令过滤器飞机通过五个“命令轴”进行控制,给定时刻的主动指令轴和响应类型取决于瞬时空速和外环空速是否接通。飞行控制器被设计为根据飞机当前的空速利用两种不同的指令模式。在悬停和低速(小于60节)时,飞机像直升机一样运行,有五个控制轴:横滚、俯仰、垂直、偏航和纵向推力。在此模式下,横滚俯仰轴为姿态指令/姿态保持(ACAH),偏航轴为速率指令,垂直轴为速率命令/高度保持。在高速(大于70节)时,飞机作为一架具有四轴控制的飞机运行:滚转、俯仰、偏航和推力。横滚和俯仰轴变为速率指令/姿态保持(RCAH),而偏航轴使用横向加速度和转弯协调模式。在60至70节之间,两种模式混合。推力轴直接控制推进器桨距。除非空速自动驾驶仪打开,在这种情况下,会跟踪空速设定点。
关于控制结构的讨论,此处省略1万字。
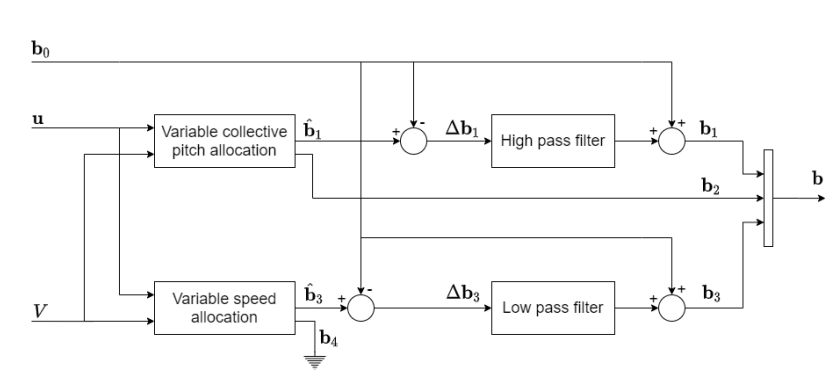
混合动力控制分配系统框图
— 4 —
操纵品质
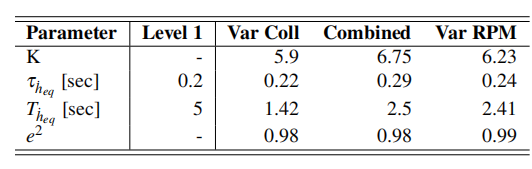
操纵品质另一个可用于比较控制分配方案的指标是根据ADS-33E-RF标准比较各个方案的操纵品质,悬停时的横滚和偏航姿态变化(ADS-33E-PRF第3.3.2.1节和3.3.5.1节)和高度响应特性(ADS-33E-PRF第3.3.10.1节)。对于短期小振幅姿态分析,模拟了频率扫描,以生成闭环横滚角指令与横滚角、俯仰角指令与俯仰角和偏航角的偏航率指令频率响应。扫描的频率范围从0.3 rad/sec到30 rad/sec。然后由CIFER(参考文献23)对结果进行处理,以生成频率响应。应注意,可变旋翼速度数据集在此处于劣势。正如前所述,在频率扫描模拟过程中,可变转速的扫描通常会超出电机扭矩限制,然后变得不稳定。因此,再次删除了可变旋翼转速情况下的扭矩限制,以便生成可比较的数据集。总体而言,可变总距方案比组合方案具有更好的俯仰和侧倾操纵品质,可变总距方案具有最小的相位延迟,因此具有最佳的操纵品质。组合方案具有最差的操纵品质,因为具有最大的相位延迟。然而,再次需要注意的是,只有当扭矩限制被移除时,才能产生可变旋翼速度的分析结果。因此,在与可变旋翼速度操纵品质进行比较时,不应过于重视。对于高度响应特性,模拟了5英尺/秒的垂直爬升阶跃响应。根据ADS-33E-PRF的指示,使用最小二乘法将指数函数拟合到响应中。
三种控制分配方案的操纵品质参数
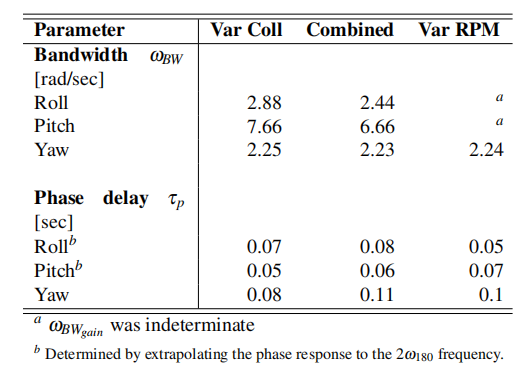
下表列出了1级操纵品质的最大值。三种分配方案均未达到1级操纵品质,因为三种方案均超过要求,因此,所有三个都具有2级操纵品质。然而,在这三种方案中,可变总距方案的操纵效果最好,因为该方案具有最小的ti和T。组合方案是最坏的方案,因为具有最大的值。在这种情况下,可变旋翼速度结果是可比较的,因为其响应受到扭矩限制。
— 5 —
结果
在电动垂直起降飞机上使用NDI飞行控制系统,调查包括研究使用空速计划切换系统,将飞机的控制结构从低速直升机控制系统切换到高速飞机控制系统。通过时域仿真证明了控制架构交换系统的成功运行。还提出了一种新的推力控制分配方案。该新方案将可变总桨距和可变旋翼速度控制分配方案结合为一个统一的方案。基于互补滤波的控制分配方案。根据ADS-33E-RF标准的规定,基于时间模拟、稳定性裕度和操纵品质,将该新方案与原始方案进行了比较。最终发现,组合方案与可变旋翼速度方案相比,组合方案的性能有所改善。特别是在电机扭矩限制的约束下。组合方案能够执行可变旋翼速度方案无法执行的任务。然而,当扭矩限制被移除时,发现组合方案与可变旋翼速度模式相比,具有相当的性能。